
|


This example is for Wiring version 1.0 build 0100+. If you have a previous version, use the examples included with your software. If you see any errors or have comments, please let us know.
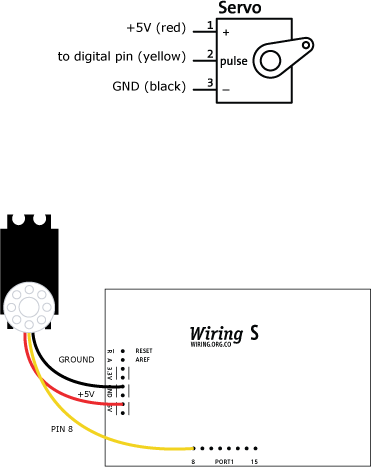
Driving Servo from a graphical user interface by BARRAGAN http://barraganstudio.com
Receives data from the serial from Processing to position a servo motor
Receives data from the serial from Processing to position a servo motor
#include <Servo.h> Servo myservo; // create servo object to control a servo int data = 0; // variable to read from the serial port void setup() { myservo.attach(8); // attaches the servo on pin 8 to the servo object Serial.begin(9600); // starts the serial Serial at 9600 bauds } void loop() { if (Serial.available()) // if data is available to read { data = Serial.read(); // read it and store it in 'val' } myservo.write(data); // sets the servo position according to value in val delay(15); // waits for the servo to get there } /* Processing code for this example // servo serial // by BARRAGAN <http://barraganstudio.com> // Write data to the serial according to the position of a marker // controlled by the mouse to position a servo motor // created 2 January 2006 import processing.serial.*; Serial port; // create serial port object int val; // variable to receive data from the serial port float mx = 0.0; boolean firstTime = true; void setup() { size(200, 200); noStroke(); frameRate(10); // List all the available serial ports in the output pane. // You will need to choose the port that the Wiring board is // connected to from this list. The first port in the list is // port #0 and the third port in the list is port #2. println(Serial.list()); // Open the port that the Wiring board is connected to (in this case #2) // Make sure to open the port at the same speed Wiring is using (9600bps) port = new Serial(this, Serial.list()[1], 9600); } void draw() { // one time wait for 3 seconds before starting to send data to // the serial if (firstTime) { delay(3000); firstTime = false; } background(#222222); // clear background fill(#555555); // set fill color rect(40, height/2-15, 120, 25); // draw square float dif = mouseX - mx; if (abs(dif) > 1.0) { mx = mx + dif/4.0; } mx = constrain(mx, 50, 150-1);// keeps marker on the screen noStroke(); fill(255); rect(50, height/2-5, 100, 5); fill(204, 102, 0); rect(mx-2, height/2-5, 4, 5);// draws the position marker int angle = (int)(mx-50)*180/100; // scales the maker value to one in the range 0-180 //print(angle + " "); // prints the current angle (debug) port.write(angle); // writes the angle to the serial port } */