
|


This example is for Wiring version 1.0 build 0100+. If you have a previous version, use the examples included with your software. If you see any errors or have comments, please let us know.
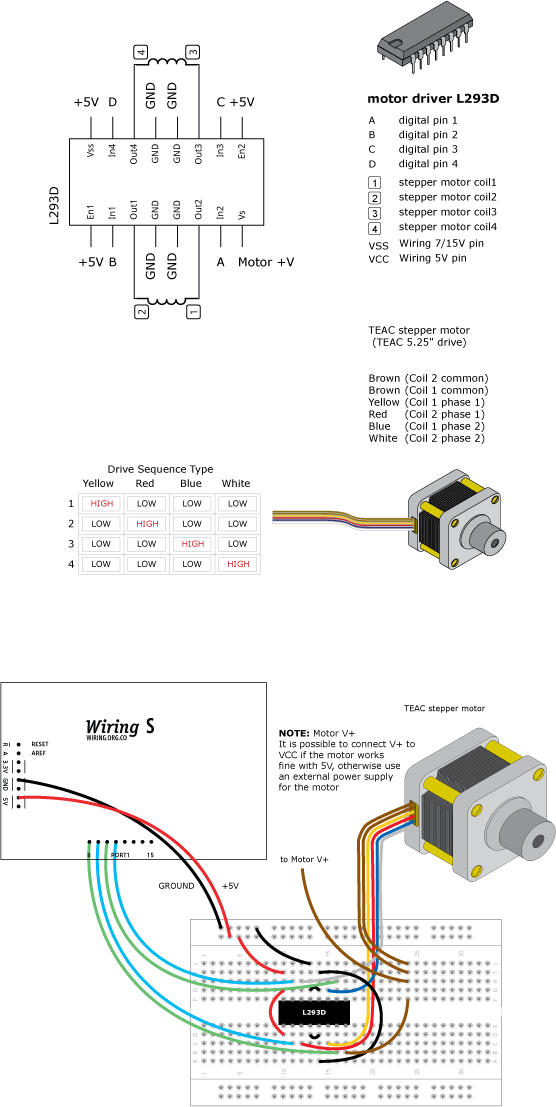
Stepper Motor Sequences by Juan Manuel Gonzalez V.
Demonstrates the use of a TEAC stepper motor using pin commands. TEAC motors rotate 360 degrees in 50 cycles (steps). For the Wiring boards v1 the on-board LED is on pin 48, on Wiring S the on-board LED is on pin 15.
Demonstrates the use of a TEAC stepper motor using pin commands. TEAC motors rotate 360 degrees in 50 cycles (steps). For the Wiring boards v1 the on-board LED is on pin 48, on Wiring S the on-board LED is on pin 15.
void setup() { int i; for (i = 8; i < 12; i++) // Analog pins for yellow, red, { pinMode(i, OUTPUT); // blue and white wires of the motor. } pinMode(WLED, OUTPUT); // Wiring board LED digitalWrite(WLED, HIGH); } void stepforward() //Drive sequence for one cycle going { //forward. digitalWrite(8, HIGH); digitalWrite(9, LOW); digitalWrite(10, LOW); digitalWrite(11, LOW); delay(30); digitalWrite(8, LOW); digitalWrite(9, HIGH); digitalWrite(10, LOW); digitalWrite(11, LOW); delay(30); digitalWrite(8, LOW); digitalWrite(9, LOW); digitalWrite(10, HIGH); digitalWrite(11, LOW); delay(30); digitalWrite(8, LOW); digitalWrite(9, LOW); digitalWrite(10, LOW); digitalWrite(11, HIGH); delay(30); } void stepbackward() //Drive sequence for one cycle going { //backward. digitalWrite(8, LOW); digitalWrite(9, LOW); digitalWrite(10, LOW); digitalWrite(11, HIGH); delay(30); digitalWrite(8, LOW); digitalWrite(9, LOW); digitalWrite(10, HIGH); digitalWrite(11, LOW); delay(30); digitalWrite(8, LOW); digitalWrite(9, HIGH); digitalWrite(10, LOW); digitalWrite(11, LOW); delay(30); digitalWrite(8, HIGH); digitalWrite(9, LOW); digitalWrite(10, LOW); digitalWrite(11, LOW); delay(30); } void loop() { stepforward(); //Repeats the required sequence over & //over to make the motor turn continuously FW. //stepbackward(); //Repeats the required sequence over & //over to make the motor turn continuously BW. }