
|


This example is for Wiring version 1.0 build 0100+. If you have a previous version, use the examples included with your software. If you see any errors or have comments, please let us know.
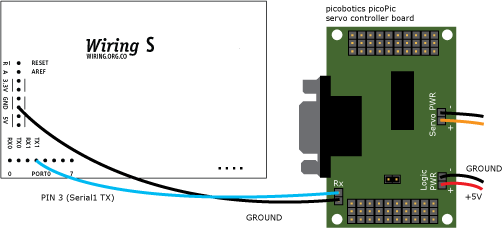
Driving a Picobotics PicoPic Servo controller board http://www.picobotics.com/Products.html by Byoungil Choi & BARRAGAN http://barraganstudio.com
Demonstrates the use of the PicoPic Servo Controller board.
Demonstrates the use of the PicoPic Servo Controller board.
int Address = 120; // Default PicoPic board address int PortNum = 10; // Use servo connected to port 10 int Position = 1000; // Position 1 int HPos; int LPos; int Position2 = 2000; // Position 2 int HPos2; int LPos2; int Speed = 10; // Slow speed to see results //1000 = 03E8, 2000 = 07D0 void setup() { Serial.begin(9600); Serial1.begin(9600); HPos = Position / 256; // get the high part of the position 1 LPos = Position % 256; // get the lower part of the position 1 HPos2 = Position2 / 256; // get the hight part of the position 2 LPos2 = Position2 % 256; // get the lower part of the position 2 pinMode(WLED, OUTPUT); // Turn ON Wiring board LED digitalWrite(WLED, HIGH); } void loop() { Serial1.write(Address); // Set the servo number 10 to position 1 Serial1.write(PortNum); Serial1.write(HPos); Serial1.write(LPos); Serial1.write(Speed); delay(5000); // Wait 5 seconds to see the change Serial1.write(Address); // Set the servo number 10 to position 2 Serial1.write(PortNum); Serial1.write(HPos2); Serial1.write(LPos2); Serial1.write(Speed); delay(5000); }