
|


This example is for Wiring version 1.0 build 0100+. If you have a previous version, use the examples included with your software. If you see any errors or have comments, please let us know.
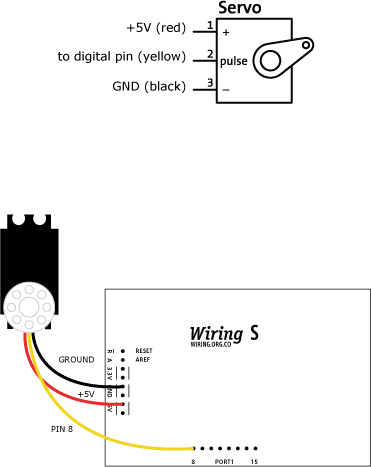
Driving multiple servos by BARRAGAN
Demonstrates the use of the servo library to drive two servo motors. It positions two generic servo motors at 0, 90 and 180 degrees.
Demonstrates the use of the servo library to drive two servo motors. It positions two generic servo motors at 0, 90 and 180 degrees.
#include <Servo.h> Servo myservo0; // create servo object to control a servo Servo myservo1; // create another servo object to control another servo void setup() { myservo0.attach(8); // attaches the servo on pin 8 to the servo object myservo1.attach(9); // attaches the servo on pin 9 to the other servo object } void loop() { myservo0.write(0); // position first servo at 0 degrees myservo1.write(0); // position second servo at 0 degrees delay(1000); // wait for the servos to reach the desired position myservo0.write(90); // at 90 degrees myservo1.write(90); delay(500); myservo0.write(180); // at 180 degrees myservo1.write(180); delay(500); }