
|


This example is for Wiring version 1.0 build 0100+. If you have a previous version, use the examples included with your software. If you see any errors or have comments, please let us know.
micromag 3-axis magnetic field sensor
Demonstrates the use of micromag 3-axis magnetic field sensor The sensor communicates using the ISP protocol. Based on Daniel Soltis example.
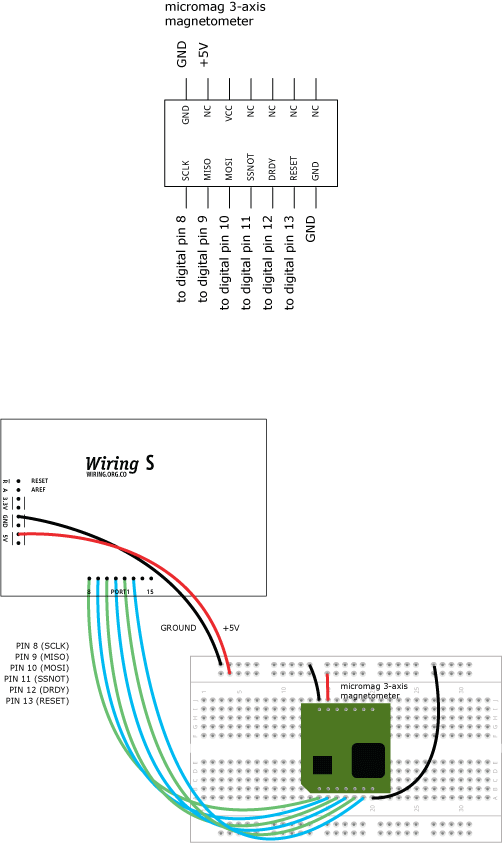
Demonstrates the use of micromag 3-axis magnetic field sensor The sensor communicates using the ISP protocol. Based on Daniel Soltis example.
int SCLKpin = 8; // magnetometer pin 1 int MISOpin = 9; // magnetometer pin 2 int MOSIpin = 10; // magnetometer pin 3 int SSNOTpin = 11; // magnetometer pin 4 int DRDYpin = 12; // magnetometer pin 5 int RESETpin = 13; // magnetometer pin 6 int x = 0; // magnetic field x axis int y = 0; // magnetic field y axis int z = 0; // magnetic field z axis int heading = 0; // magnetic field heading void setup() { Serial.begin(9600); pinMode(WLED, OUTPUT); // turn ON the board LED for diagnostics only digitalWrite(WLED, HIGH); pinMode(SSNOTpin, OUTPUT); pinMode(RESETpin, OUTPUT); pinMode(MOSIpin, OUTPUT); pinMode(SCLKpin, OUTPUT); pinMode(MISOpin, INPUT); pinMode(DRDYpin, INPUT); digitalWrite(SSNOTpin, LOW); } void loop() { x = readAxis(0); // read the x-axis magnetic field value y = readAxis(1); // read the y-axis magnetic field value z = readAxis(2); // read the z-axis magnetic field value heading = getHeading(x, y, z); // calculates the magnetic field heading Serial.print("x: "); Serial.print(x, DEC); Serial.print("y: "); Serial.print(y, DEC); Serial.print("z: "); Serial.print(z, DEC); Serial.print("heading: "); Serial.print(heading, DEC); delay(20000); // next reading in 20 seconds } // specific commands for the sensor void sendBit(int bit) { // send the bit on the RISING edge of the clock digitalWrite(MOSIpin, bit); delay(2); digitalWrite(SCLKpin, HIGH); delay(2); digitalWrite(SCLKpin, LOW); delay(2); } int receiveBit() { // receive the data on the FALLING edge of the clock digitalWrite(SCLKpin, HIGH); delay(2); int bit = digitalRead(MISOpin); delay(2); digitalWrite(SCLKpin, LOW); delay(2); return bit; } float readAxis(int axis) { // send eight bits, wait until the data is ready then receive 16 bits // pulse the reset digitalWrite(RESETpin, LOW); delay(2); digitalWrite(RESETpin, HIGH); delay(2); digitalWrite(RESETpin, LOW); delay(2); // send the command byte // set the time to read the magnetic sensors (ASIC period) as /2048 sendBit(LOW); sendBit(HIGH); sendBit(HIGH); sendBit(LOW); sendBit(LOW); sendBit(LOW); // the last two bits select the axis if (axis == 0) // x axis { sendBit(LOW); sendBit(HIGH); } else if (axis == 1) // y axis { sendBit(HIGH); sendBit(LOW); } else // z axis { sendBit(HIGH); sendBit(HIGH); } // wait until the DRDY line is high while (digitalRead(DRDYpin) == LOW) { } long total = 0; // receive result // the leftmost bit mark the number as positive or negative long sign = receiveBit(); // the remaining bits are converted to an integer for (int i = 14; i >= 0; i = i - 1) { long thisbit = receiveBit(); thisbit = thisbit << i; total = total | thisbit; } if (sign == 1) { total = total - 32768; } // set and return the appropriate variable if (axis == 0) { x = total; } else if (axis == 1) { y = total; } else { z = total; } return total; } int getHeading(float x, float y, float z) { float heading = 0; if ((x == 0) && (y < 0)) heading = PI / 2.0; if ((x == 0) && (y > 0)) heading = 3.0 * PI / 2.0; if (x < 0) heading = PI - atan(y / x); if ((x > 0) && (y < 0)) heading = -atan(y / x); if ((x > 0) && (y > 0)) heading = 2.0 * PI - atan(y / x); return int(degrees(heading)); }