
|


This example is for Wiring version 1.0 build 0100+. If you have a previous version, use the examples included with your software. If you see any errors or have comments, please let us know.
I2C HMC6343 compass heading (sparkfun breakout) by BARRAGAN (http://barraganstudio.com)
Demonstrates use of the Wire library reading data from the HMC6343 compass heading On Wiring v1 boards the SCL and SDA pins are: 0 and 1 On Wiring S board the SCL and SDA pins are: 8 and 9
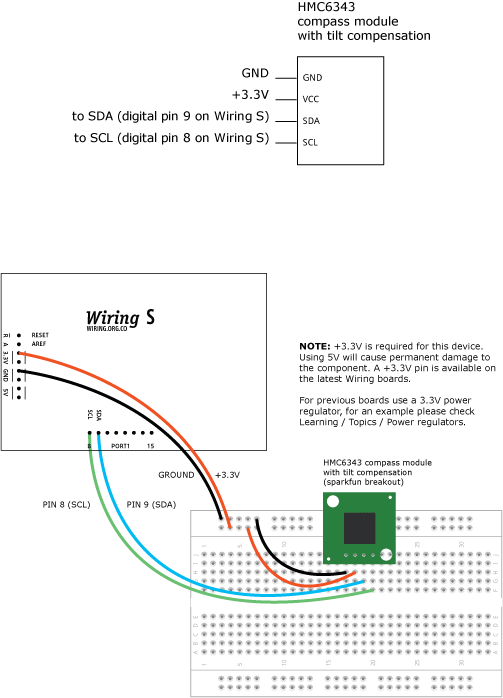
Demonstrates use of the Wire library reading data from the HMC6343 compass heading On Wiring v1 boards the SCL and SDA pins are: 0 and 1 On Wiring S board the SCL and SDA pins are: 8 and 9
#include <Wire.h> int compassAddress = 0x32 >> 1; // From datasheet compass address is 0x32 for write operations, // or 0x33 for read operations. // shift the address 1 bit right, the Wire library only needs the 7 // most significant bits for the address int heading = 0; // variable to hold the heading angle int tilt = 0; // variable to hold the tilt angle int roll = 0; // variable to hold the roll angle byte responseBytes[6]; // for holding the sensor response bytes void setup() { delay(500); //Wait at least 500 milli-seconds for device initialization Wire.begin(); // join i2c bus (address optional for master) Serial.begin(9600); // start serial communication at 9600bps pinMode(WLED, OUTPUT); digitalWrite(WLED, HIGH); // just turn ON the onboard LED } void loop() { readSensor(); // read data from the HMC6343 sensor // Note that heading, tilt and roll values are in tenths of a degree, for example // if the value of heading is 1234 would mean 123.4 degrees, that's why the result // is divided by 10 when printing. Serial.print("Heading: "); Serial.print(heading / 10, DEC); Serial.print(" Tilt: "); Serial.print(tilt / 10, DEC); Serial.print(" Roll: "); Serial.println(roll / 10, DEC); delay(200); // wait for half a second } void readSensor() { // step 1: instruct sensor to read echoes Wire.beginTransmission(compassAddress); // transmit to device // the address specified in the datasheet is 66 (0x42) // but i2c adressing uses the high 7 bits so it's 33 Wire.write(byte(0x50)); // Send a "Post Heading Data" (0x50) command to the HMC6343 Wire.endTransmission(); // stop transmitting // step 2: wait for readings to happen delay(2); // datasheet suggests at least 1 ms // step 3: request reading from sensor Wire.requestFrom(compassAddress, 6); // request 6 bytes from slave device #33 // step 4: receive reading from sensor if (6 <= Wire.available()) // if six bytes were received { for (int i = 0; i<6; i++) { responseBytes[i] = Wire.read(); } } heading = ((int)responseBytes[0]<<8) | ((int)responseBytes[1]); // heading MSB and LSB tilt = (((int)responseBytes[2]<<8) | ((int)responseBytes[3])); // tilt MSB and LSB roll = (((int)responseBytes[4]<<8) | ((int)responseBytes[5])); // roll MSB and LSB }